Traffic Signal Light Control
Modeling traffic near intersections is not a trivial task since traffic is complex and stochastic in nature. Nonlinear traffic models such as neural network (NN) based models can result in a nonlinear control problem that has high computation burden and is challenging for real-time implementation. NN models can have poor performance for unknown conditions that have not been seen during the training stage. Coordination of multiple intersections is crucial to improve traffic movements along a corridor, but the dimension of the control problem increases.
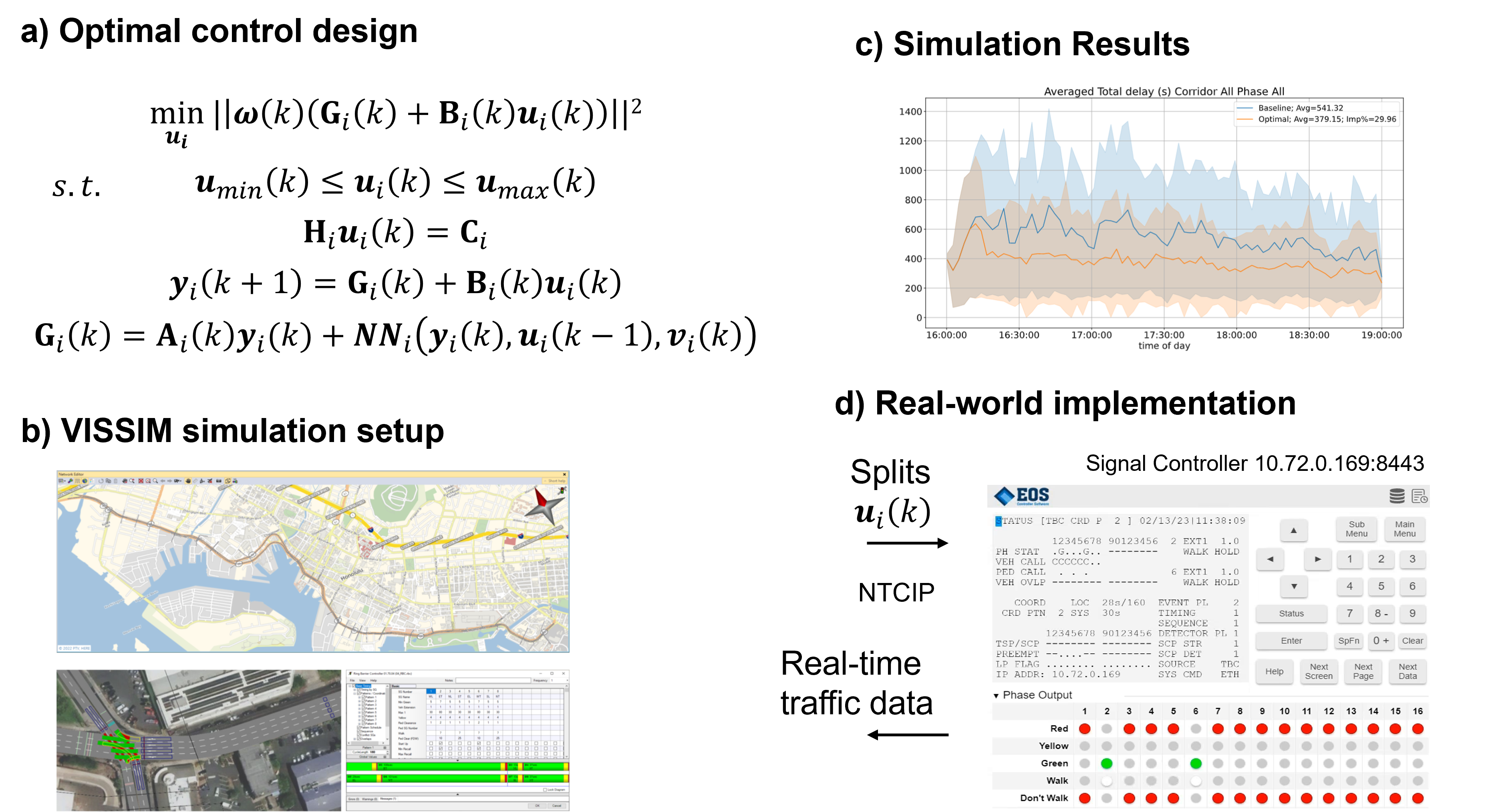
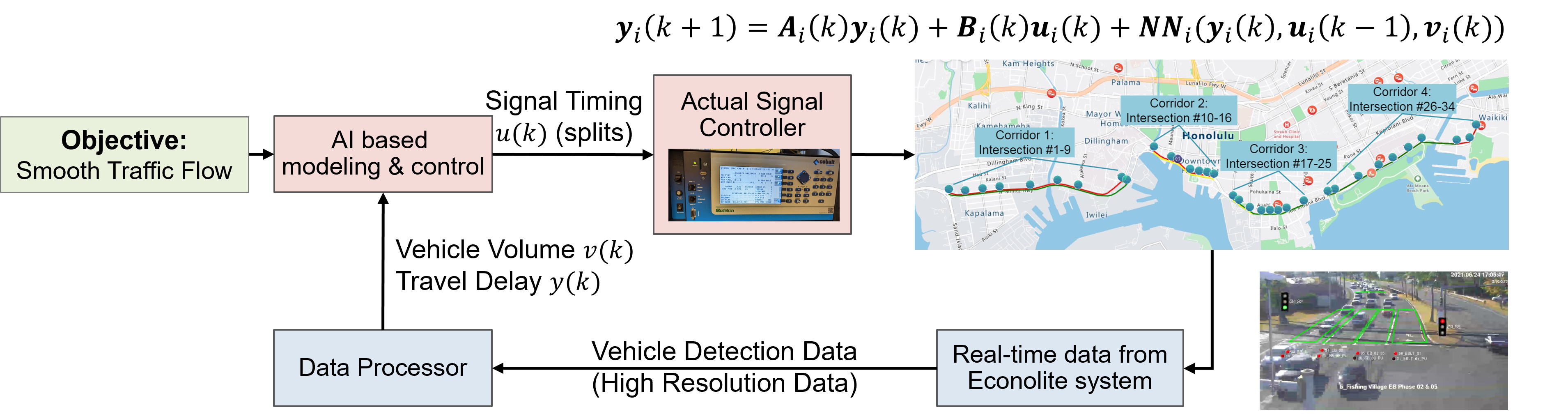
As such, a real-time multi-input and multi-output (MIMO) traffic signal control framework is proposed that can systematically reduce travel delay across an entire corridor. An integrated linear and nonlinear models known as the hybrid neural network (HNN) approach is utilized that is real-time implementable and has good modeling accuracy. In addition, an adaptive parameter updating scheme is developed to learn unknown system dynamics online to improve control performance for traffic conditions that have not been seen during the training stage. With this HNN design, an optimization problem is formulated as a linear quadratic optimization problem that can be solved in real time. An evaluation framework is designed with a digital twin of the actual corridors in VISSIM microsimulation to facilitate the control design and evaluation as well as the actual field implementation. For a real-world urban arterial of 34 intersections and 4 corridors in Hawaii, simulation results in the digital twin have shown an overall of 30% delay reduction with optimal signal control strategy.