Hardware-in-the-loop Evaluation of Connected and Automated Vehicles
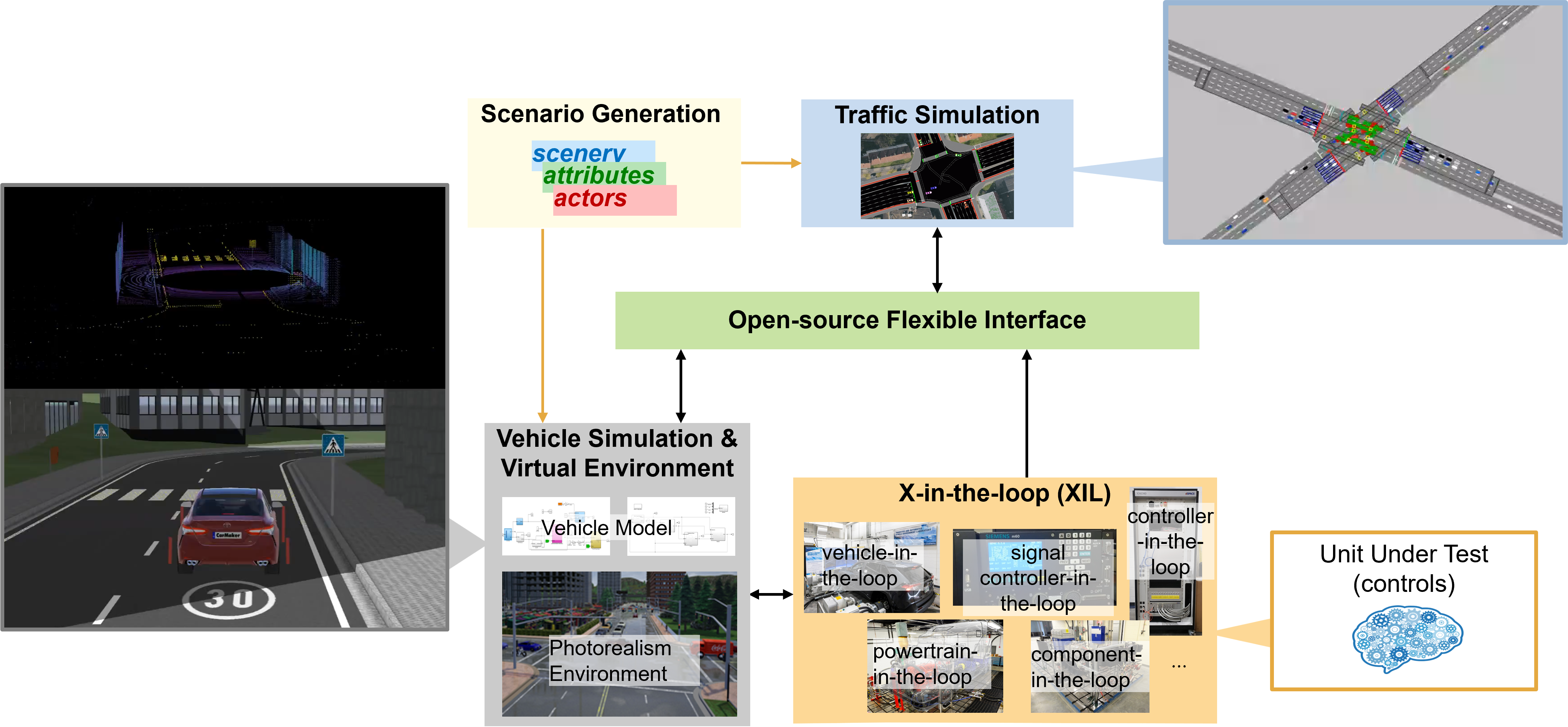
Connected and automated vehicle (CAV) technologies need comprehensive testing and evaluation before actual implementation in the real world. However, many inherent technical challenges exist due to the complexity of CAVs. An integrated evaluation platform is needed with vehicle and traffic simulation tools from different domains and X-in-the-loop (XIL) components to fully evaluate all aspects of CAV technologies. A multi-resolution XIL simulation framework named Real-Sim is presented to support inclusive testing and evaluation of CAVs.
Using a flexible interface to handle connections, co-simulation of various vehicle and traffic simulation tools with different XIL systems can be easily achieved and become a transparent “plug-and-play” process to users. In addition, the Real-Sim framework supports perception sensor and communication emulation to test various advanced driver-assistance systems, automated driving systems, and connected vehicle technologies. The open-sourced flexible interface can be found at Github (https://github.com/Real-Sim-XIL).