Multi-vehicle Cooperative Driving
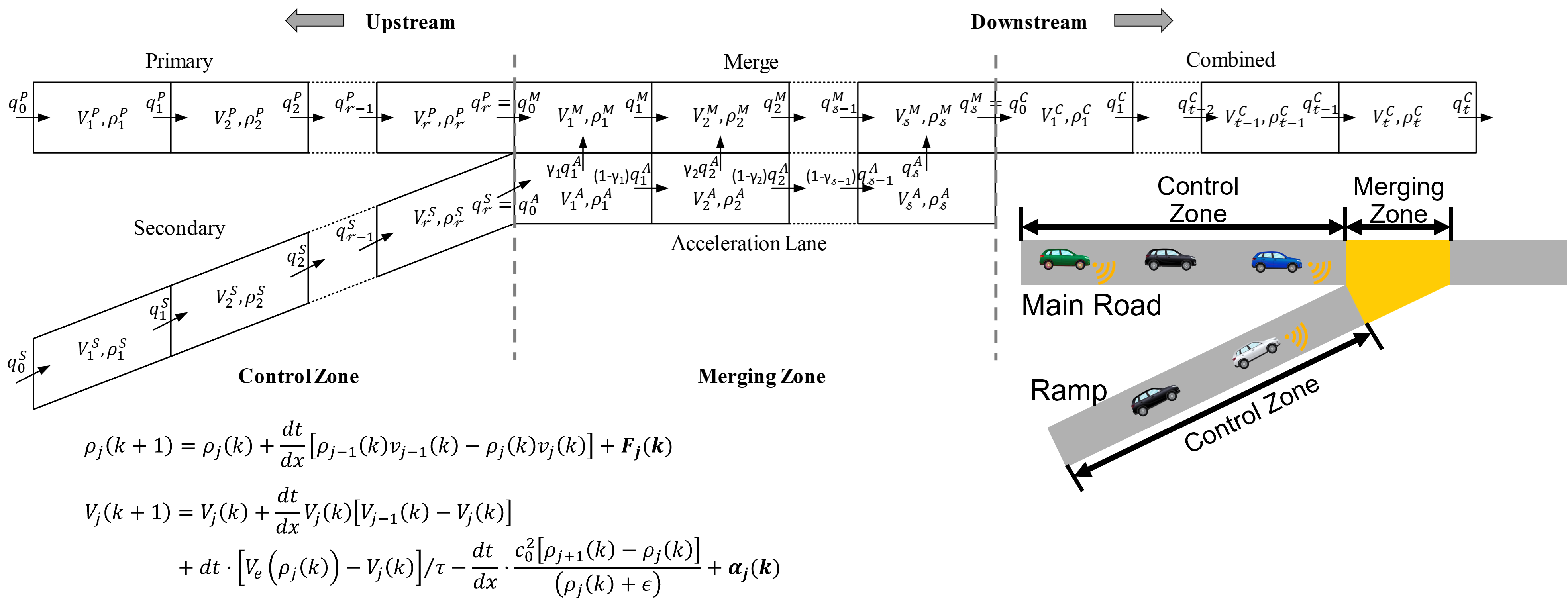
A centralized controller coordinates the arrivals of vehicles around a merging ramp to improve energy efficiency and mobility. It is a type of Cooperative Driving Automation (CDA) algorithm where a centralized controller receives information on the position of all vehicles inside a control zone near the merging area. A traffic prediction framework is developed to predict the arrival time of each vehicles entering the control zone. Then, the controller coordinates the arrival times of all vehicles at the merging area based on the following principle: a vehicle enters the control zone earlier and closer to the merging area will have a higher priority and hence enter the merging area earlier regardless of whether it is on the main road or the ramp. For example, in figure below, the order will be a blue car, white car, black car on the main road; black car on a ramp, and a green car. This coordination principle can reduce potential queues and stops at both the main road and the ramp to optimize the traffic flow and capacity at the global level. Once the vehicle merging order is coordinated, the controller also optimizes the desired speed of all CAVs with an analytical solution obtained using the Pontryagin minimum principle.
The vidoe shows experimental validation of the cooperative merging scenario using two X-in-the-loop (XIL) laboratories. The first XIL laboratory emulates a vehicle on the ramp road and includes an actual engine and transmission of a Class 8 truck. The second XIL laboratory emulates a vehicle on the main road and includes a passenger electric vehicle (EV) on a hub dynamometer connected to all four wheels. The optimal control profiles are shown on the figure inside the video. Both the vehicles have a smooth deceleration and then acceleration to leave adequate space for merging. In this scenario, the gear shifts occurred on the actual transmission in the XIL laboratory. It again shows the importance to include detailed vehicle dynamics for CAV evaluation and verifies the results.