Individual Vehicle Control
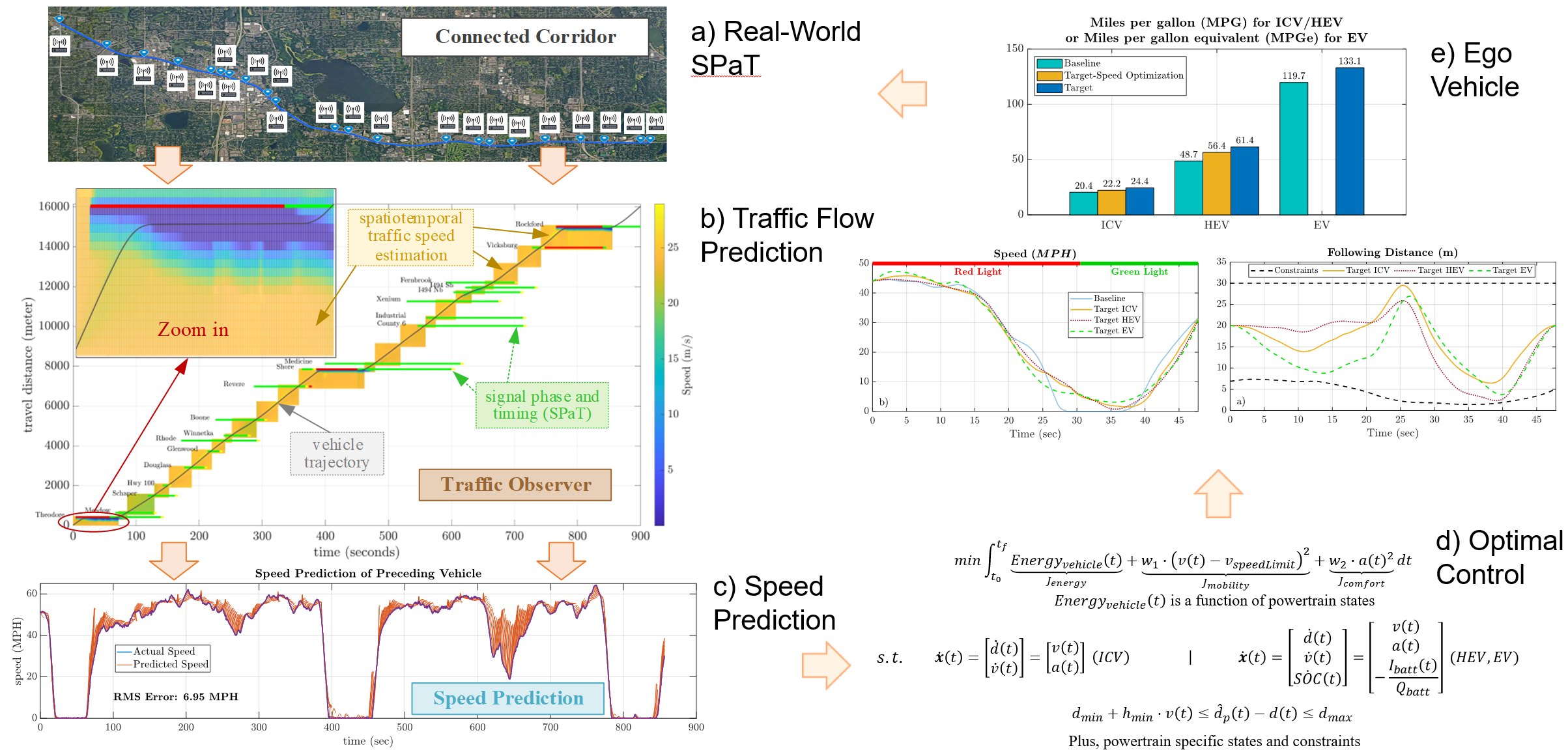
Connected and automated vehicles (CAVs) can bring energy, mobility, and safety benefits to transportation. Energy savings can be achieved by solving a mathematical optimization problem for a lookahead horizon using previewed traffic information enabled by connectivity. However, it is challenging to predict short term traffic, especially for mixed-traffic scenarios, where both connected and unconnected vehicles are on the road. A unified control framework is developed that integrates real-time traffic prediction with the co-optimization of vehicle motion and powertrain operation. Optimization problems are formulated and solved for the three most common vehicle types: internal combustion engine-based vehicles (ICVs), hybrid electric vehicles (HEVs), and electric vehicles (EVs). The traffic prediction algorithm can handle mixed-traffic scenarios and is based on a macroscopic traffic flow model. Information from connected vehicles essentially provides a partial measurement of traffic states. The rest of the unknown states are estimated using a traffic state observer. Then, the preceding vehicle's future trajectory is obtained and input to the optimization to formulate the car-following distance constraint. The integrated traffic prediction and optimization keep updating in a rolling-horizon fashion.